如何理解步进电机的失步和过冲
2020-03-20 16:47:43 来源:工程师谭军
【哔哥哔特导读】步进电机从其结构形式上可分为反应式步进电机(Variable Reluctance,VR)、永磁式步进电机Permanent Magnet,PM)、混合式步进电机(Hybrid Stepping,HS)、单相步进电机、平面步进电机等多种类型,在我国所采用的步进电机中以反应式步进电机为主。
本文主要是关于步进电机的相关介绍,并着重对步进电机的失步和过冲现象进行了详尽的阐述。
步进电机
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
主要分类
步进电机从其结构形式上可分为反应式步进电机(Variable Reluctance,VR)、永磁式步进电机Permanent Magnet,PM)、混合式步进电机(Hybrid Stepping,HS)、单相步进电机、平面步进电机等多种类型,在我国所采用的步进电机中以反应式步进电机为主。步进电机的运行性能与控制方式有密切的关系,步进电机控制系统从其控制方式来看,可以分为以下三类:开环控制系统、闭环控制系统、半闭环控制系统。半闭环控制系统在实际应用中一般归类于开环或闭环系统中。
反应式:定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
永磁式:永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
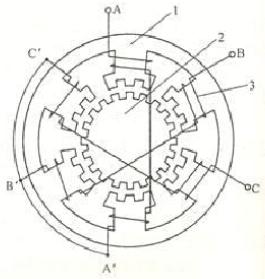
混合式:混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。
选择方法
步进电机和驱动器的选择方法:
判断需多大力矩:静扭矩是选择步
进电机的主要参数之一。负载大时,需采用大力矩电机。力矩指标大时,电机外形也大。
判断电机运转速度:转速要求高时,应选相电流较大、电感较小的电机,以增加功率输入。且在选择驱动器时采用较高供电电压。
选择电机的安装规格:如57、86、110等,主要与力矩要求有关。
确定定位精度和振动方面的要求情况:判断是否需细分,需多少细分。
根据电机的电流、细分和供电电压选择驱动器。
基本原理
工作原理
通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
发热原理
通常见到的各类电机,内部都是有铁芯和绕组线圈的。绕组有电阻,通电会产生损耗,损耗大小与电阻和电流的平方成正比,这就是我们常说的铜损,如果电流不是标准的直流或正弦波,还会产生谐波损耗;铁心有磁滞涡流效应,在交变磁场中也会产生损耗,其大小与材料,电流,频率,电压有关,这叫铁损。铜损和铁损都会以发热的形式表现出来,从而影响电机的效率。步进电机一般追求定位精度和力矩输出,效率比较低,电流一般比较大,且谐波成分高,电流交变的频率也随转速而变化,因而步进电机普遍存在发热情况,且情况比一般交流电机严重。
主要构造
步进电机也叫步进器,它利用电磁学原理,将电能转换为机械能,
人们早在20世纪20年代就开始使用这种电机。随着嵌入式系统(例如打印机、磁盘驱动器、玩具、雨刷、震动寻呼机、机械手臂和录像机等)的日益流行,步进电机的使用也开始暴增。不论在工业、军事、医疗、汽车还是娱乐业中,只要需要把某件物体从一个位置移动到另一个位置,步进电机就一定能派上用场。步进电机有许多种形状和尺寸,但不论形状和尺寸如何,它们都可以归为两类:可变磁阻步进电机和永磁步进电机。
步进电机是由一组缠绕在电机固定部件--定子齿槽上的线圈驱动的。通常情况下,一根绕成圈状的金属丝叫做螺线管,而在电机中,绕在齿上的金属丝则叫做绕组、线圈、或相。
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。

瑞盟科技新品MS35779,提供高达2A的持续工作电流,专为要求严苛的高性能运动控制应用而设计。

随着智能座舱对静谧性与舒适性要求的不断提升,瑞盟科技正式推出MS35629NA车规级步进电机驱动芯片。
步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。步进电机驱动器,是一种将电脉冲转化为角位移的执行机构。步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。

哔哥哔特将邀请MPS电机驱动芯片产品线高级应用工程于2022年12月15日下午14:00至15:00主办一场线上直播会议,演讲主题为《步进电机的反电动势研究》,报名正在火热进行中,欢迎企业积极报名!
由于步进电机能够逐步移动,因此它们在工业自动化和机器人技术中得到了应用。这些电机用于 IC 制造单元。这些电机在 CNC(计算机数字控制)机器和 xy 绘图仪的设计中起着不可或缺的作用。

对于步进电机失步问题,用户首先要知道,一般电机失步都是其中一相或二相缺失,即一条线路断了,不能正常发挥功能,从而导致电机失步

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。