应用于表贴式永磁同步电机转速环的复合PI无位置传感器
2020-06-23 14:09:05 来源:电气新科技
【哔哥哔特导读】该方法存在三大弊端:①使用位置传感器增大了电机体积,提高了成本;②复杂环境下位置传感器易出现故障,系统可靠性降低;③位置传感器检测的转子机械角度存在量化误差,使得对其微分得到的实际转速反馈存在测量噪声,影响闭环系统的跟踪性能。
永磁同步电机因功率密度高、运行可靠等优点被广泛应用于诸多工业领域,在其控制算法中,PI控制因结构简单、算法易实现而占据主导地位。然而,永磁同步电机具有多变量、非线性、强耦合的特点,并且在其运行过程中,负载转矩实时变化,传统的PI控制技术已无法满足工业自动化对时变转速实时跟踪性和鲁棒性的要求。与此同时,转速闭环系统中,实际转速反馈大多通过对位置传感器检测的转子机械角度进行微分来间接获取。
该方法存在三大弊端:①使用位置传感器增大了电机体积,提高了成本;②复杂环境下位置传感器易出现故障,系统可靠性降低;③位置传感器检测的转子机械角度存在量化误差,使得对其微分得到的实际转速反馈存在测量噪声,影响闭环系统的跟踪性能。因此,需摒弃位置传感器的使用,增强闭环系统转速反馈的准确性。
为实现永磁同步电机高性能控制,其控制系统内的转速外环和电流内环均需对其相应指令实时跟踪,并且对外部干扰具备较强的鲁棒性。由于电流内环系统跟踪性能只与电机内部参数有关,与外部负载扰动无关,往往需通过精确数学模型计算输出电压给定即可达到良好的电流跟踪效果,因此实际工程应用中,电流环参数一旦确定,则适用于各种工况场合,参数无需二次调整。
而对于转速外环系统,会受到时变转速给定和时变负载等不确定性外部扰动,要达到转速实时跟踪目的较为困难,其控制方法主要包括PI控制、滑模控制、内模控制、自抗扰控制以及二自由度控制等。实际永磁同步电机高性能调速系统中,控制策略仍然以PI控制为主。对于PI控制,其参数整定对于系统跟踪性能和抗扰性能至关重要。
江苏科技大学电子信息学院、江苏舾普泰克自动化科技有限公司的研究人员,针对传统永磁同步电机转速环PI控制下转速跟踪性能差的问题,设计了一种复合PI控制器应用于表贴式永磁同步电机(Surface Permanent Magnet Synchronous Motor, SPMSM)转速环控制系统。
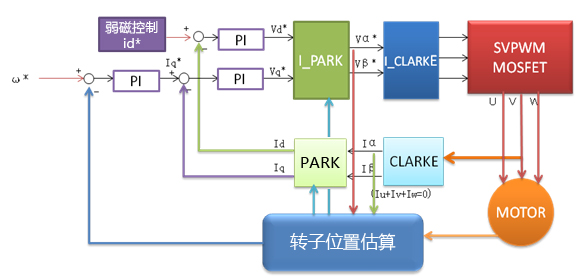
在传统PI控制的基础上,转速环采用积分钳位型抗积分饱和方法,增加给定输入微分前馈环节和控制增益环节,简化PI参数整定过程,增强转速环系统跟踪响应性能。在此基础上,分析无阻尼自然频率和阻尼比两者参数选取对系统转矩扰动和角速度测量噪声抑制能力的影响,证明系统抗转矩扰动性能与抑制噪声性能之间存在矛盾,需摒弃位置传感器。当前无位置传感器控制大多首先通过滑模观测器观测到电机两相静止坐标系下的反电动势,对其反正切处理以间接获得转子位置和转速。
该方法通过两相反电动势间接计算转子位置以及转速,同样避免不了反馈噪声的影响。针对该问题,研究人员设计以电机转子机械角速度为直接状态变量的新型滑模观测器,对角速度值进行观测,将其直接引入至转速环闭环系统作为反馈,避免角速度反馈噪声对转速跟踪性能造成影响。
研究人员以750W表贴式永磁同步电机为实验对象,对转速环复合PI无位置传感器控制策略下的相应实验波形进行分析研究,实验结果验证了时变输入下复合PI控制相对于传统PI控制优良的跟踪性能,新型控制策略对于转矩扰动和转速扰动有着较强的鲁棒性。另外,考虑到该控制策略目前只能应用于表贴式永磁同步电机,下一步将重点研究控制策略的普及化以及工程化问题,以期实现其实际工程应用。
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。
风力发电机组在自然环境中工作,不可避免地会受到雷击的影响。雷击不仅会损坏设备,造成巨大损失,甚至可能危及人身安全。因此,有效的防雷技术对于保障风力发电系统的安全运行至关重要。

清洁电器市场由中国企业主导,科沃斯双品牌、石头科技高端出海、莱克电机壁垒、富佳极致代工各显实力。清洁电器企业正走向智能化与供应链重塑。2026苏州清洁电器技术创新论坛将聚焦底层硬科技,助力行业破解瓶颈,抢占蓝海红利。

新能源汽车作为电机的核心应用场景,下游整车扩产与产品结构升级将推动电机企业加速技术迭代与产能布局。

值此本文将对GaN逆变器用于仿人机器中的关键各部件组成与功能及电机设计与激光驱动器架构和电力电子的相关要求作研对,重点对电机驱动及激光驱动器设计应用示例作解晰,与此同时对拓展出机器人关节驱动一站式新趋势应用方案作说明。

珠海宜源科技重磅推出7.5kW双通道电机模拟器,针对性解决测试难题,为行业带来全新测试解决方案。

具体来看,肩、肘、髋、膝等大关节需要关节模组、无框力矩电机等部件来支撑高扭矩的稳定运动;而灵巧手则更依赖空心杯电机等微型电机,实现更轻量、更精细的抓取与操作。

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。