详解步进电机和伺服电机联系和区别
2020-04-24 17:04:45 来源:佚名
【哔哥哔特导读】它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,如86BYG 250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为‘电机固有步距角’,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
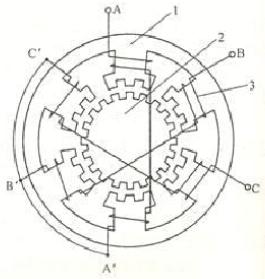
“细分驱动”概述: 将“电机固有步距角”细分成若干小步的驱动方法,称为细分驱动,细分是通过驱动器精确控制步进电机的相电流实现的,与电机本身无关。其原理是,让定子通电相电流并不一次升到位,而断电相电流并不一次降为0(绕组电流波形不再是近似方波,而是N级近似阶梯波),则定子绕组电流所产生的磁场合力,会使转子有N个新的平衡位置(形成N个步距角)。
如何控制伺服马达
标准的微型伺服马达有三条控制线,分别为:电源、地、控制。电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于4V—6V之间,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)。甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理。
输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在1ms—2ms之间,而低电平时间应在5ms到20ms之间,并不很严格,下表表示出一个典型的20ms周期性脉冲的正脉冲宽度与微型伺服马达的输出臂位置的关系:
伺服马达的电源引线
电源引线有三条,如图中所示。伺服马达三条线中红色的线是控制线,接到控制芯片上。中间的是SERVO工作电源线,一般工作电源是5V。 第三条是地线。
伺服马达的运动速度
伺服马达的瞬时运动速度是由其内部的直流马达和变速齿轮组的配合决定的,在恒定的电压驱动下,其数值唯一。但其平均运动速度可通过分段停顿的控制方式来改变,例如,我们可把动作幅度为90o的转动细分为128个停顿点,通过控制每个停顿点的时间长短来实现0o—90o变化的平均速度。对于多数伺服马达来说,速度的单位由“度数/秒”来决定。
使用伺服马达的注意事项
除非你使用的是数码式的伺服马达,否则以上的伺服马达输出臂位置只是一个不准确的大约数。普通的模拟微型伺服马达不是一个精确的定位器件,即使是使用同一品牌型号的微型伺服马达产品,他们之间的差别也是非常大的,在同一脉冲驱动时,不同的伺服马达存在±10o的偏差也是正常的。
正因上述的原因,不推荐使用小于1ms及大于2ms的脉冲作为驱动信号,实际上,伺服马达的最初设计表也只是在±45o的范围。而且,超出此范围时,脉冲宽度转动角度之间的线性关系也会变差。要特别注意,绝不可加载让伺服马达输出位置超过±90o的脉冲信号,否则会损坏伺服马达的输出限位机构或齿轮组等机械部件。
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。

瑞盟科技新品MS35779,提供高达2A的持续工作电流,专为要求严苛的高性能运动控制应用而设计。

随着智能座舱对静谧性与舒适性要求的不断提升,瑞盟科技正式推出MS35629NA车规级步进电机驱动芯片。
步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。步进电机驱动器,是一种将电脉冲转化为角位移的执行机构。步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。

哔哥哔特将邀请MPS电机驱动芯片产品线高级应用工程于2022年12月15日下午14:00至15:00主办一场线上直播会议,演讲主题为《步进电机的反电动势研究》,报名正在火热进行中,欢迎企业积极报名!
由于步进电机能够逐步移动,因此它们在工业自动化和机器人技术中得到了应用。这些电机用于 IC 制造单元。这些电机在 CNC(计算机数字控制)机器和 xy 绘图仪的设计中起着不可或缺的作用。

对于步进电机失步问题,用户首先要知道,一般电机失步都是其中一相或二相缺失,即一条线路断了,不能正常发挥功能,从而导致电机失步

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。





