详解步进电机和伺服电机联系和区别
2020-04-24 17:04:45 来源:佚名
【哔哥哔特导读】它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,如86BYG 250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为‘电机固有步距角’,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
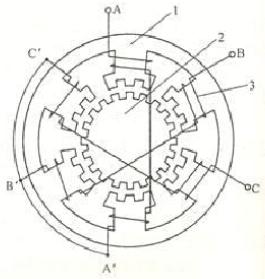
步进电机分三种:永磁式(PM) ,反应式(VR)和混合式(HB)。永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度 或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。混合式步进电机的应用最为广泛200步进电机与伺服电机333332首次关注51黑电子论坛及“单片机教程网”官方微信获得的论坛黑币奖励。
步进电机的基本参数:
1.电机固有步距角
它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,如86BYG 250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为‘电机固有步距角’,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
通常步进电机步距角β的一般计算按下式计算。
β=360°/(Z·m·K)
式中 β―步进电机的步距角;
Z―转子齿数;
m―步进电动机的相数;
K―控制系数,是拍数与相数的比例系数
2.步进电机的相数
是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72° 。在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己步距角的要求。如果使用细分驱动器,则‘相数’将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
3.保持转矩(HOLDING TORQUE)
是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。
DETENT TORQUE:是指步进电机没有通电的情况下,定子锁住转子的力矩。DETENTTORQUE 在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENTTORQUE。
步进电机主要特性
1. 步进电机必须加驱动才可以运转, 驱动信号必须为脉冲信号,没有脉冲的时候, 步进电机静止, 如果加入适当的脉冲信号,就会以一定的角度(称为步角)转动。转动的速度和脉冲的频率成正比。例如步进电机的步进角度为7.5 度,一圈360 度, 需要48 个脉冲完成。
2. 步进电机具有瞬间启动和急速停止的优越特性。
3. 改变脉冲的顺序,可以方便的改变转动的方向。
因此,目前打印机,绘图仪,机器人,等设备都以步进电机为动力核心。
步进电机驱动器的特点
它是构成步进电机驱动器系统的专用集成电路:
A、脉冲分配器集成电路:如三洋公司的PMM8713、PMM8723、PMM8714等。
B、包含脉冲分配器和电流斩波的控制器集成电路:如SGS公司的L297、L6506等。
C、只含功率驱动(或包含电流控制、保护电路)的驱动器集成电路:如日本新电元工业公司的MTD1110(四相斩波驱动)和MTD2001(两相、H桥、斩波驱动)。
D、将脉冲分配器、功率驱动、电流控制和保护电路都包括在内的驱动控制器集成电路,如东芝公司的TB6560AHQ、MOTOROLA公司的SAA1042(四相)和ALLEGRO公司的UCN5804(四相)等。
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。

瑞盟科技新品MS35779,提供高达2A的持续工作电流,专为要求严苛的高性能运动控制应用而设计。

随着智能座舱对静谧性与舒适性要求的不断提升,瑞盟科技正式推出MS35629NA车规级步进电机驱动芯片。
步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。步进电机驱动器,是一种将电脉冲转化为角位移的执行机构。步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。

哔哥哔特将邀请MPS电机驱动芯片产品线高级应用工程于2022年12月15日下午14:00至15:00主办一场线上直播会议,演讲主题为《步进电机的反电动势研究》,报名正在火热进行中,欢迎企业积极报名!
由于步进电机能够逐步移动,因此它们在工业自动化和机器人技术中得到了应用。这些电机用于 IC 制造单元。这些电机在 CNC(计算机数字控制)机器和 xy 绘图仪的设计中起着不可或缺的作用。

对于步进电机失步问题,用户首先要知道,一般电机失步都是其中一相或二相缺失,即一条线路断了,不能正常发挥功能,从而导致电机失步

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。





