永磁交流伺服电机应用中需重点考虑的几个问题
2016-08-03 09:54:40 来源:佳机网
【哔哥哔特导读】但是笔者在十多年的客户调研过程中,发现很多工程师对交流伺服电机的几个重点知识都有些困惑,如电机绕组相序与编码器信号相序的判别,电机关键参数KT和KE的意义及如何在工程计算中有效利用这两个参数,电机功率等。本文从工程应用的角度出发对以上问题进行详尽阐述。
摘要:永磁交流伺服电机有响应快、功率密度大、效率高、运行平稳等特点,所以在自动化应用等行业得到了广泛的应用。但是笔者在十多年的客户调研过程中,发现很多工程师对交流伺服电机的几个重点知识都有些困惑,如电机绕组相序与编码器信号相序的判别,电机关键参数KT和KE的意义及如何在工程计算中有效利用这两个参数,电机功率等。本文从工程应用的角度出发对以上问题进行详尽阐述。
关键词:永磁交流伺服电机, 永磁同步电机, 电机相序,转矩常数,反电势常数,电机功率
引言
永磁交流伺服电机绕组相序与编码器信号相序如何判别,电机关键参数KT和KE的意义及如何在工程计算中有效利用这两个参数,如何理解电机功率,工程应用上如何利用这些参数,本文对这些问题都进行了论述。
1 永磁交流伺服电机的基本原理
PMSM的定子绕组结构为三相对称绕组,转子结构为表面贴装式永磁结构或内嵌式永磁结构,其绕组反电动势为正弦波,当给电机定子绕组通入三相对称的正弦波电流时,电机将产生连续的电磁转矩。PMSM的转子永磁体在工作气隙内产生接近正弦波的磁场,所以转子转动时就在电枢绕组上感生接近正弦波的反电动势。PMSM的三相电枢绕组与180导通型半桥逆变电路相连接,驱动电压是经由空间矢量脉宽调制的脉冲电压。电动机运行时,三相电枢绕组同时接通,在工作气隙内产生“连续式”圆形旋转磁场。为了实现伺服控制,PMSM的位置传感器可以采用旋转变压器或光电编码器,目前工业应用较多的是增量式光电编码器。伺服驱动的编码器一般需要两组信号:
1)A,B,Z信号,其中A,B两路脉冲相位差90,这样可以方便的判断电机转向;Z信号,则每转输出一个脉冲,用于基准点定位。(目前雷赛伺服不需要Z信号)
2)U,V,W信号:三路脉冲信号彼此相位差120,每转所发出的脉冲个数与电机极对数一致。根据U,V,W信号的高低电平关系就可以判断电动机转子现在的位置。
在电动机启动前,根据U,V,W三路脉冲信号电平高低关系就可以估算出电动机磁极现在的位置。一旦电机旋转起来,A,B信号则可精确检测出转子位置角度。
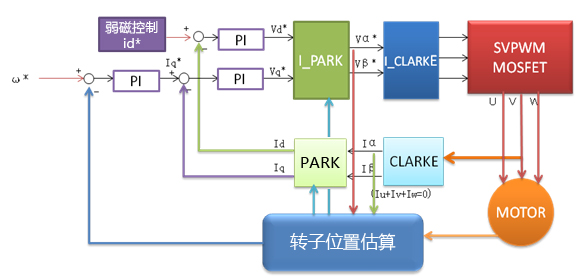
目前的主流PMSM伺服驱动基本都采用矢量控制技术,系统框图如下。
三相PMSM矢量控制伺服系统框图
2 永磁交流伺服电机的相序如何定义或判别
在PMSM伺服电机的生产过程中,需有一道重要装配调试工序来确保电机三相绕组反电动势与编码器信号U,V,W的合适相位关系,具体解释如以下3个图。
三相绕组反电势波形1:
三相绕组反电势波形2:
三相U,V,W编码器信号波形:
编码器信号与线电势的相位关系:
3 永磁交流伺服电机的KT和KE
3.1 永磁电机的反电动势常数KE
只要电机在转动,必然会有线圈切割磁力线,所以会有反电动势产生。对于具体的某型号电机,其转动速度越快,则产生的反电动势电压越高。也即反电动势电压与电机转速成正比。反电动势常数KE 就是用来表示这种比例关系的。
KE =E/N (式中E为反电动势,单位为V;N为电机转速:单位为KRPM)。
例:用对拖的方法带动某电机以3000RPM的速度旋转,测得该电机的A相与B相之间的电压为30V,则其KE 计算方法如下:
KE =E/N=30V/3KRPM=10V/KRPM
3.2永磁直流电机的转矩常数KT
对于具体的某型号电机,通过电机绕组电流越大,则电机轴产生的转矩越大。也即电机的转矩与电机绕组电流成正比。转矩常数KT 就用来表示电机的转矩与通过电机绕组电流之比。
KT = T / I (式中T为转矩:NM, I为电流:A)
例:测得某电机轴的输出转矩为0.35NM,测得此时的绕组电流为5A,则其KT计算方法如下:
KT = T / I =0.35/5=0.07NM/A
3.3 永磁交流伺服电机的KT和KE的关系
永磁直流电机的反电动势常数KE和转矩常数KT的关系:
当以角速度(1/s)单位进行计算时:
Ke= w *P*φ/π=Kt
上式中:w—每极总计算导体数
B—计算直径柱面上的磁感应强度
P—极对数
φ—每极磁通………………φ=LτB
所以你要知道,其实对于具体某个电机,你只要知道其反电动势常数KE和转矩常数KT这两个参数的任何一个,则另外一个就知道了。一个重要公式:
KT= KE÷104.7 (式中KT的单位为Nm/A;KE单位为V/KRPM)
例如:某电机的KE=9.39V/KRPM,请问该电机的是KT多大?简易工程计算方法如下:
KT= KE÷104.7=9.39÷104.7=0.0897 Nm/A
4 永磁交流伺服电机的转子惯量
伺服驱动器对于伺服电机所带的负载惯量的要求是,适用负载惯量为小于电机转子惯量的5倍,所以,较大的电机转子惯量,可带较大的负载惯量,但电机的机械时间常数会增大,电机对速度的响应会降低;较小的电机转子惯量,电机的机械时间常数小,电机对速度的响应反应快,但所容许电机所带的负载惯量不能大。
5永磁交流伺服电机的转矩和功率
永磁交流伺服电机的额定转矩是指电机能够连续安全输出的转矩大小,在环境温度为25 ºC时,它会使电机的绕组温度达到最大允许值。电机的额定功率,是指电机在额定转速,额定转矩下,所输出的机械功率。 电机功率的计算公式:
P = N*T ÷9549.3
(式中P: 功率,单位为kW; N电机额定转速,单位为RPM; T: 额定转矩,单位为Nm)。
例如:某电机的功率为200W,额定转速为3000RPM,请问其额定转矩为多大?
由以上公式得:T=(9549.3 * P) ÷N=((9549.3 *0.2) ÷3000=0.64 Nm
由于伺服电机是闭环控制运行,在Id=0的控制方式下(矢量控制),电机转矩的大小与供给电机电流的大小成正比。电机的转矩输出随负载的变化而变化,当负载恒定时,伺服电机的转矩输出也为恒定。伺服电机可短时间的过载运行,过载倍数由驱动器输出的过载电流决定,过载时间由驱动器的容量及伺服电机的温升来决定。一般的过载倍数为3倍。
6 永磁交流伺服电机的绝缘等级
电机绝缘等级:表示电机所用的绝缘材料及绝缘结构,允许工作的温度。
电机绝缘结构耐热等级分为5等,如下表:
PMSM伺服电机的绝缘等级一般为B或F级。7 永磁交流伺服电机的防护等级
防护等级:电机的防护等级是用IP及后二位数字来标志的。
第一位数字表示电机对固体的防护程度,
第二位数字表示电机对液体的防护程度。
二位数字的含义如下表所示:
IP后面第一位数字的含义
IP后面第二位数字的含义
作者简介:黄捷建(1973-),男,高级工程师,从事稀土永磁电机和电机驱动器的设计、应用推广工作。
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。

永磁伺服电机使用电流磁体驱动电机运行,但实际上,低温会降低磁体的磁化强度。需要对伺服电机性能的这种影响进行研究,尤其是在低电压,高电流的应用中。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。