步进电机小知识
2015-09-25 13:45:24 来源:网络
【哔哥哔特导读】步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
步进电机的细分技术实质上是一种电子阻尼技术(请参考有关文献),其主要目的是减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术的一个附带功能。比如对于步进角为1.8°的两相混合式步进电机,如果细分驱动器的细分数设置为4,那么电机的运转分辨率为每个脉冲0.45°,电机的精度能否达到或接近0.45°,还取决于细分驱动器的细分电流控制精度等其它因素。不同厂家的细分驱动器精度可能差别很大;细分数越大精度越难控制。
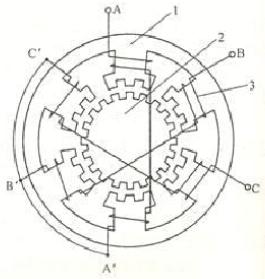
11.四相混合式步进电机与驱动器的串联接法和并联接法有什么区别?
四相混合式步进电机一般由两相驱动器来驱动,因此,连接时可以采用串联接法或并联接法将四相电机接成两相使用。串联接法一般在电机转速较的场合使用,此时需要的驱动器输出电流为电机相电流的0.7倍,因而电机发热小;并联接法一般在电机转速较高的场合使用(又称高速接法),所需要的驱动器输出电流为电机相电流的1.4倍,因而电机发热较大。
12.如何确定步进电机驱动器的直流供电电源?
A.电压的确定
混合式步进电机驱动器的供电电源电压一般是一个较宽的范围(比如IM483的供电电压为12~48VDC),电源电压通常根据电机的工作转速和响应要求来选择。如果电机工作转速较高或响应要求较快,那么电压取值也高,但注意电源电压的纹波不能超过驱动器的最大输入电压,否则可能损坏驱动器。
B.电流的确定
供电电源电流一般根据驱动器的输出相电流I来确定。如果采用线性电源,电源电流一般可取I的1.1~1.3倍;如果采用开关电源,电源电流一般可取I 的1.5~2.0倍。
13.混合式步进电机驱动器的脱机信号FREE一般在什么情况下使用?
当脱机信号FREE为低电平时,驱动器输出到电机的电流被切断,电机转子处于自由状态(脱机状态)。在有些自动化设备中,如果在驱动器不断电的情况下要求直接转动电机轴(手动方式),就可以将FREE信号置低,使电机脱机,进行手动操作或调节。手动完成后,再将FREE信号置高,以继续自动控制。
14.如果用简单的方法调整两相步进电机通电后的转动方向?
只需将电机与驱动器接线的A+和A-(或者B+和B-)对调即可。
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。

瑞盟科技新品MS35779,提供高达2A的持续工作电流,专为要求严苛的高性能运动控制应用而设计。

随着智能座舱对静谧性与舒适性要求的不断提升,瑞盟科技正式推出MS35629NA车规级步进电机驱动芯片。
步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。步进电机驱动器,是一种将电脉冲转化为角位移的执行机构。步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。

哔哥哔特将邀请MPS电机驱动芯片产品线高级应用工程于2022年12月15日下午14:00至15:00主办一场线上直播会议,演讲主题为《步进电机的反电动势研究》,报名正在火热进行中,欢迎企业积极报名!
由于步进电机能够逐步移动,因此它们在工业自动化和机器人技术中得到了应用。这些电机用于 IC 制造单元。这些电机在 CNC(计算机数字控制)机器和 xy 绘图仪的设计中起着不可或缺的作用。

对于步进电机失步问题,用户首先要知道,一般电机失步都是其中一相或二相缺失,即一条线路断了,不能正常发挥功能,从而导致电机失步

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。









