基于DSP的永磁同步电机全速范围转子定位
2015-10-23 14:49:37 来源:电子科技
【哔哥哔特导读】针对传统永磁同步电机矢量控制过程中,需要精确的转子位置进行坐标轴系变换问题,采用一种基于DSP的永磁同步电机转子位置检测和初始定位的方法。
针对传统永磁同步电机矢量控制过程中,需要精确的转子位置进行坐标轴系变换问题,采用一种基于DSP的永磁同步电机转子位置检测和初始定位的方法。该方法在电机静止时使用改进的磁定位法,通过分别两次输出直流转矩,将转子先牵引出定位盲区,然后固定到预定位置进行转子初始定位;在电机运行后采用改进的 M/T法,以及可变的采样时间测量速度和转子位置信息。同时在实验平台上验证了该方法,实验结果表明该方法能准确定位转子初始位置,电机在低速和高速时能准确测出转子位置信息,且具有一定的可靠性和有效性。
永磁同步电机的控制策略,例如矢量控制,需要精确的全速范围内的转子位置进行解耦变换。而其中转子初始位置最为重要,初始位置的误差会影响其后转子位置的计算,从而导致永磁同步电机解耦变换错误,导致无法对电机进行正确控制。针对传统的磁定位法,可能由于电机静止时转子位置位于定位盲区,普通的直流转矩不能使转子旋转到预定位置,使用改进的磁定位法,通过二次直流转矩定位,精确定位转子初始位置。针对传统的M/T算法存在检测时间、误差大的问题,使用改进的M/T算法,缩短了计算时间和提高了计算精度。
1 改进磁定位法原理
磁定位法原理是通过给逆变器发出直流触发脉冲信号,例如图1脉冲信号为(100)输出给电机定子绕组静止的电流矢量。
其产生的直流转矩会将定子旋转到固定位置,从而完成永磁同步电机的转子初始位置定位,原理如图2所示。
永磁同步电机的电磁转矩公式为
Tem=KFsFrsinθsr (1)
式中,Fs为定子磁势;Fr为转子磁势;K为由电机参数决定的常数;θsr为转子磁势和定子磁势的夹角。
由式(1)可知,电磁转矩将使电机转子向θsr减小的方向旋转,直到电磁转矩与电机固有转矩达到稳定的平衡点。最终使转子D轴与电机A轴重合,完成转子的预定位。但转子位置在预定前是随机的,当施加电压矢量为直轴负方向时,θsr=90°,电磁力矩Tem则等于0。转子的磁定位会由于转子不转动而失败。
为了避免转子位置位于上述的定位盲区,使用二次定位。在转子预定位前,在与预定位置相差90°的位置施加一个电压矢量,使转子位置离开上述定位盲区,然后再施加原定的电压矢量,将已离开定位盲区的转子定位到预定位置,完成转子的预定位操作。
2 变M/T法原理
增量式光电编码器旋转一圈会发出A相、B相和Z相3路脉冲。其中,A相和B相为两路正交脉冲信号,Z相脉冲等于编码器旋转圈数。其输出波形如图3所示。
M/T法原理为测周期/频率法,原理是在检测时间和此时间内编码器发出的脉冲个数。设1个时问间隔为Tg,Tg后检测到的第1个编码器脉冲终止DSP的内部脉冲计数器,计此时脉冲计数器值为m2,并用m2来测量检测时间T,且
T=Tg+△T (2)
设N为编码器旋转一周发出的脉冲数;m1为T时间内编码器发出的脉冲数;X为T时间内电机转过的角度位移,及
X=2πm1/N (3)
则电机转速可表示为
但上述M/T法存在检测信号时间过长,检测误差大的问题,针对此问题,提出了变M/T法。其原理是在检测高频时钟脉冲和编码器信号脉冲的同时,采用随编码器发出脉冲信号而变化的时间Tg。取Tg=m3/fc,m3不含△T时间内的高频脉冲个数。则电机转速可表示为
n2=60m1fc/m3N (6)
转子位置信息可推导为
θ=θ0/p+(n2Tg/60)·2π (7)
其中,θ0为电机的转子初始位置;p为电机极对数。式(7)可化简为
θ=θ0/p+2πm1/N (8)
该方法在高速和低速情况下,检测精度与检测时间均优于传统M/T法。
3 实验
实验选用的DSP为TI公司的TMS320F28335,永磁同步电机的额定功率为500 W,极对数为4,编码器为2 500线。实验平台如图4所示。
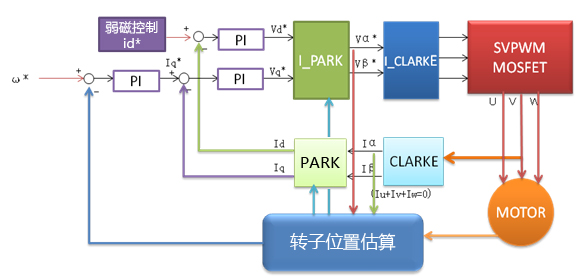
全速范围的转子位置定位系统框图如图5所示。
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。

基于高集成度 G32M3101 电机控制 SoC开发的浴霸风机,主控芯片搭载 Arm® Cortex®-M0+ 内核,主频达 64MHz,并配置 64KB Flash 与 8KB SRAM。应用采用无感FOC矢量控制算法,利用PID控制器对参考速度和实际速度进行闭环调节,输出电流向量大小,通过估算器实现对转子位置及速度的精准获取。

针对电磁轴承转子系统的悬浮控制问题,本文提出了一种基于多维可视化的多目标优化控制策略。

本文提出了两款永磁汽车发电机的转子结构:径向磁通的空心结构转子和切向磁通的高气隙磁密转子。二者的共同特点是将汽车发电机的两大性能指标之一的[零电流转速]降低到600rpm以下。该发电机非常适用于城市公交车,提高了效率,延长了车载蓄电池的使用寿命,节能节油,经济效益明显。
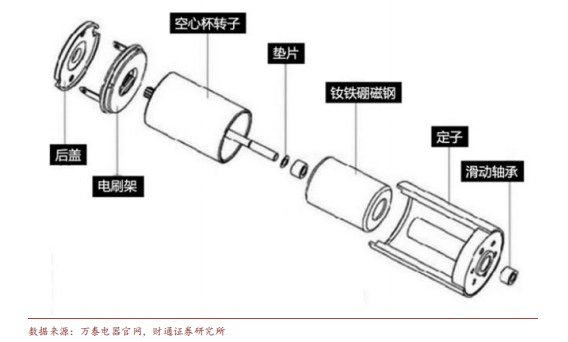
作为一种采用无铁芯转子的直流永磁伺服控制电机,空心杯电机具有体积小、功率密度大、控制特性良好等特点,在人形机器人灵巧手或将取得大量应用。

无刷直流电机不需要电刷和换向器之间的物理接触。这一步消除了摩擦引起的机械损耗,使无刷直流电机更适合长期使用。由于转子不需要供电,因此无需电刷和滑环,换向器组件也简化了结构。

三相绕线转子电动机,是在电机转子回路中串接电阻或电抗器,实现电机起动电流小、起动转矩大的效果,即有效地改善电机起动性能。直流电动机的滑环也叫换向器,与电刷配合实现电机电流换向。

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。