步进电动机为什么需要驱动电路才能工作
2020-05-19 16:35:43 来源:电子发烧友网
【哔哥哔特导读】步进电动机的驱动电源由变频脉冲信号源、脉冲分配器及脉冲放大器组成,由此驱动电源向电机绕组提供脉冲电流。步进电动机的运行性能决定于电机与驱动电源间的良好配合。
步进电动机概述
步进电动机是将电脉冲激励信号转换成相应的角位移或线位移的离散值控制电动机,这种电动机每当输入一个电脉冲就动一步,所以又称脉冲电动机。
步进电动机的驱动电源由变频脉冲信号源、脉冲分配器及脉冲放大器组成,由此驱动电源向电机绕组提供脉冲电流。步进电动机的运行性能决定于电机与驱动电源间的良好配合。
步进电机的优点是没有累积误差,结构简单,使用维修方便,制造成本低,步进电动机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低,发热大,有时会“失步”。
步进电动机的分类
1、机电式步进电动机
机电式步进电动机由铁心、线圈、齿轮机构等组成。螺线管线圈通电时将产生磁力,推动其铁心心子运动,通过齿轮机构使输出轴转动一角度,通过抗旋转齿轮使输出转轴保持在新的工作位置;线圈再通电,转轴又转动一角度,依次进行步进运动。
2、磁电式步进电动机
磁电式步进电动机其结构简单,可靠性高,价格低廉,应用广泛。主要有永磁式、磁阻式和混合式。
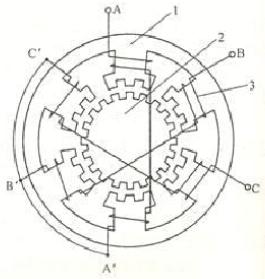
(1)永磁式步进电动机。其转子有永磁体的磁极,在气隙中产生极性交替磁场,定子由四相绕组组成(见图)。当A相绕组通电时,转子将转向该相绕组所确定的磁场方向。当A相断电、B相绕组被通电励磁时,就产生一个新的磁场方向,这时,转子就转动一角度而位于新的磁场方向上,被励磁相的顺序决定了转子转动方向。若定子励磁的变化太快,转子将不能和定子磁场方向的变化保持一致,转子即失步。起动频率和运行频率较低,是永磁式步进电动机的一个缺点。但永磁式步进电动机消耗功率较小,效率较高。20世纪80年代初,出现了转子是盘式的永磁盘式步进电动机,使步距角及工作频率达到磁阻式步进电动机的水平。
(2)磁阻式步进电动机。其定、转子铁芯的内外表面上设有按一定规律分布的相近齿槽,利用定、转子铁芯齿槽相对位置变化引起磁路磁阻的变化,从而产生转矩。其转子铁芯由硅钢片或软磁材料做成,当定子某相被励磁时,转子将转到使磁路磁阻最小的位置。当另一相被励磁,转子转到另一位置,使磁路磁阻为最小时,电动机就停止转动。这时,转子转过一个步距角θb,即式中N为转子转过一个齿距的运行拍数;ZR为转子齿数。
磁阻式步进电动机结构形式较多。定子铁芯有单段式、多段式;磁路有径向、轴向;绕组相数有三相、四相、五相。磁阻式步进电动机步距角可做到1°~15°,甚至更小,精度容易保证,起动与运行频率较高,但功耗较大,效率较低。
(3)混合式步进电动机。它的定、转子铁芯结构与磁阻式步进电动机相似。转子有永磁体在气隙中产生单极性磁场,此磁场还被转子上软磁材料的齿槽调制。
混合式步进电动机兼有永磁式步进电动机与磁阻式步进电动机两者的优点,电动机步距角小,精度高,工作频率高,且功耗小,效率高。
3、直线式步进电动机
有反应式和索耶式两类。索耶式直线步进电动机由静止部分(称为反应板)和移动部分(称动子)组成。反应板由软磁材料制成,在它上面均匀地开有齿和槽。电机的动子由永久磁铁和两个带线圈的磁极A和B组成。动子是由气垫支承,以消除在移动时的机械摩擦,使电机运行平稳并提高定位精度。这种电机的最高移动速度可达1.5米/秒,加速度可达2g,定位精度可达20多微米。由两台索耶式直线步进电动机相互垂直组装就构成平面电动机。给x方向和y方向两台电机(图3)以不同组合的控制电流,就可以使电机在平面内做任意几何轨迹的运动。大型自动绘图机就是把计算机和平面电动机组合在一起的新型设备。平面电动机也可用于激光剪裁系统,其控制精度和分辨力可达几十微米。
步进电动机工作原理
我们应用图11.20来说明这种电动机的工作原理。
磁阻式步进电动机的定子上装有多相励磁绕组,图11.20中为最常使用的三相绕组步进电动机的示意图。三相绕组形成6个磁极。转子由软磁材料制成,上有4个齿。当A相绕组通电,而B、C相绕组均不通电时,由于磁通力图走磁阻最小路径,使磁路磁阻最小,因此产生磁阻转矩使齿1、3的轴线与定子A相磁极对齐。在下一时刻给B相通电,断开A相供电将使转子齿2、4的轴线与B相磁极对齐,转子因此整体上逆时针旋转了30°。因此按A-B-C—A…的顺序使三个绕组轮流通电将使得转子逆时针方向连续旋转。如果按A-C-B-A…的顺序通电,转子将顺时针旋转。由此可得到如下的判断:
(1)步进电动机的旋转方向取决于绕组通电的顺序;
(2)电动机的转速取决于绕组通断的频率;
(3)绕组的每次通电切换,转角步进的距离为转子齿间夹角距的l/m,亦即步距角为齿距的l/m。
上述步进电动机模型中每步步距角为30°,很难适应精细控制的要求。实际的电动机采用如图11. 21的结构。在这种结构中定子磁极的极弧上开有一些均匀分希的小齿,转子表面也均匀分布着小齿。转子小齿之间按角度度量的齿距和定子的齿距完全相等。所谓齿距就是相邻两齿中心线的夹角,又称为齿距角DT=360°/Zr 式中DT-齿距; Zr-转子的齿数。
由于开了这些小齿,转子在绕组切换时的转动在小于DT的范围内就能找到一个磁阻最小的位置,这样就大大减小了步距角,提高了运动的分辨率。
从图11. 20的分析中注意到当转子的齿与某一磁极的齿完全吻合时,对于m相电动机来说,转子的齿与其他二相磁极的齿必须依次错开l/m齿距。对于三相电动机来说,当A相通电时,转子的小齿与B、C两相磁极上的小齿必须依次错开DT/3。在这种约束下,转子的齿数就不能是任意数值,而是必须满足以下的条件:
Zr/2p=K±1/m即Zr=2p(K±1/m)=2pK±2
式中K-正整数; p-极对数; m-相数,p=m。
混合式步进电动机的工作原理
图中的电动机定子有4个沿圆周均匀分布的齿,线圈绕制在齿上且成对连接。具有不同极性的两段转子各有3个齿。图中以实线表示S段,以虚线表示N段,两段转子交错半个齿距。
当绕组中不通电流时,因为转子中的永磁体总是试图减少磁路中的磁阻,转子将趋向有限的若干位置,直至N极和S极转子上各有一齿与定子磁极对齐。对于图中的电机来说,这样的位置有12个。将转子保持在这些位置上的转矩通常不大,称之为维持转矩。
如果如图11. 28(a)那样有电流通过一相绕组,在定子上产生的N极和S极将吸引异性转子段上的齿,在这种情况下,只有和转子的齿数一样的3个稳定位置,将转子从定位位置上拉开的转矩要大得多,称为锁定转矩。
将通电方式由图(a)切换至图(b),定子磁场转过90。,并将吸引另一对齿,结果转子旋转了30。,相当于一个整步。在从图(b)到图(c)中,励磁又回到前一绕组,但是电流方向相反,可使转子再前进一整步。在图(d)中再使第二相绕组电流反向又可前进一步。这样转子就走过了一个齿距。步骤从图(d)后再回到图(a),如此反复,形成电动机的旋转运动,每转需要12步。显然,以相反的顺序激励定子绕组,电动机将反转。
通常定子的小齿以不同于转子的齿距均匀分布,在齿数较多的电动机中(如图11. 27),定子和转子的齿距排列使得只有转子对面的两个齿与两个相距180。的定子齿完全对齐。同时,相距90。机械角处的定转子齿则完全错开。对于这样结构的混合式电动机,可用如下的公式计算其每转步数N=┃NrNs/(Ns-Nr)┃
其中,N为每转步数;Nr和Ns分别是转子和定子的齿数。对于图11.27中的例子,Nr和Ns分别是8和10,则可计算出这种电动机每转40步,步距角为9。
步进电动机为什么需要驱动电路才能工作
步进电动机是为了精确位移设计的,为了达到较高精度效率必然偏低电流大,不是直流电机加电就可运行。且步进电机是靠单片子产生脉冲来控制转矩的,单片机本身驱动电流较小,驱动不了电机绕组,要用驱动电路产生较大电流,直接驱动会烧坏单片机。
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。

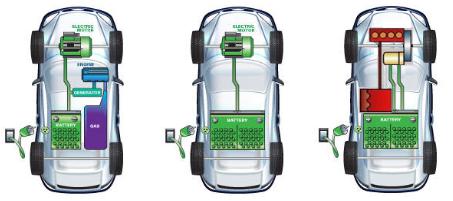
以特斯拉为代表的纯电动汽车(EV)也仅是将发动机替代为电动机,依然使用齿轮变速箱进行动力传递。
驱动电机作为新能源汽车驱动系统中的核心部件,其性能直接决定了整车的动力性能。驱动电机可分为直流电动机、交流异步感应电动机、永磁同步电动机、开关磁阻电动机。驱动电机作为动力能源,要驱动整车进行运动,且相应速度要足够快,要求驱动电机具备高的功率密度。
步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。步进电机驱动器,是一种将电脉冲转化为角位移的执行机构。步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。
三相异步电动机是机械工业生产中最常见的电气设备,它的作用就是把电能转换为机械能。针对三相异步电动机的机械故障,介绍了三相异步电动机的故障诊断,阐述了三相异步电动机的常见故障检排方法,研究了三相异步电动机的典型故障检修,提出了三相异步电动机异常杂音的故障检修。

为削减因运输造成的温室效应气体.正不断推进EV(电动汽车)的普及。作为电动汽车主要性能的研究课题是延长续驶里程,提升蓄电池/单电池(Cell) 的容量以及可有效利用容量的状态判定、功率控制、充电控制等技术的开发。
下一代乘用车正在部署电动汽车技术,包括电池、电动机、电力电子和 48 伏系统,以减少 CO 2排放并创造更可持续的未来。使用这些技术的车辆架构从电池电动汽车到插电式混合动力电动汽车,需要电池或燃料电池来提供和存储能量,以及用于推进的电动机和电力电子设备。

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。