伺服电机选型注意事项分析
2018-11-27 14:12:32 来源:易维通订阅号
【哔哥哔特导读】为了满足机械设备对高精度、快速响应的要求,伺服电机应有较小的转动惯量和大的堵转转矩,并具有尽可能小的时间常数和启动电压,还应具有较长时间的过载能力。
为了满足机械设备对高精度、快速响应的要求,伺服电机应有较小的转动惯量和大的堵转转矩,并具有尽可能小的时间常数和启动电压,还应具有较长时间的过载能力。以满足低速大转矩的要求,能够承受频繁启动、制动和正、反转,如果盲目地选择大规格的电机,不仅增加成本,也会使得设计设备的体积增大,结构不紧凑,因此选择电机时应充分考虑各方面的要求,以便充分发挥伺服电机的工作性能;下面介绍伺服电机的选型注意事项。
1.伺服电机常用的几种制动方式
我们容易对电磁制动,再生制动,动态制动的作用混淆,选择了错误的配件,以下对这几个概念加以澄清。
动态制动器由动态制动电阻组成,在故障、急停、电源断电时通过能耗制动缩短伺服电机的机械进给距离。
再生制动是指伺服电机在减速或停车时将制动产生的能量通过逆变回路反馈到直流母线,经阻容回路吸收。
电磁制动是通过机械装置锁住电机的轴。
三者的区别:
再生制动必须在伺服器正常工作时才起作用,在故障、急停、电源断电时等情况下无法制动电机。动态制动器和电磁制动工作时不需电源。
再生制动的工作是系统自动进行,而动态制动器和电磁制动的工作需外部继电器控制。
电磁制动一般在SVOFF后启动.否则可能造成放大器过载,动态制动器一般在SVOFF或主回路断电后启动,否则可能造成动态制动电阻过热。
动态制动和再生制动都是靠伺服电机内部的激磁完成的,也就是向旋转方向相反的方向增加电流来实现。
电磁制动,也就是常说的抱闸,是靠外围的直流电源控制,常闭。得电后抱闸打开,失电即闭合,属于纯机械摩擦制动。
选择配件的注意事项:
1、有些系统如传送装置,升降装置等要求伺服电机能尽快停车,而在故障、急停、电源断电时伺服器没有再生制动,无法对电机减速。同时系统的机械惯量又较大.这时对动态制动器的要依据负载的轻重、电机的工作速度等进行选择。
2、有些系统要维持机械装置的静止位置,需电机提供较大的输出转矩,且停止的时间较长。如果使用伺服的自锁功能,往往会造成电机过热或放大器过载,这种情况就要选择带电磁制动的电机。
3、有的伺服驱动器有内置的再生制动单元,但当再生制动较频繁时,可能引起直流母线电压过高,这时需另配再生制动电阻。再生制动电阻是否需要另配,配多大,可参照相应样本的使用说明来配。
4、如果选择了带电磁制动器的伺服电机,电机的转动惯量会增大,计算转矩时要进行考虑。
2.速度/位置检测器
交流伺服电机的控制精度是由电机轴后端的旋转编码器来保证。用其来测量电机的工作速度或转过位置量。
常用的旋转编码器是增量式的,其编码器码盘是由很多光栅刻线组成的,有两个(或4个)光眼读取A、B信号的,刻线的密度决定了这个增量型编码器的分辨率,也就是可以分辨读取的最小变化角度值。代表增量编码器的分辨率的参数是PPR,也就是每转脉冲数。有些增量编码器,其原始刻线是2048线(2的11次方,11位),通过16倍(4位)细分,得到15位PPR,再次4倍频(2位),得到了17位(Bjt)的分辨率,一般用“位、Bit”来表达分辨率。这种编码器在较快速度时,内部要用未细分的低位信号来处理输出,否则响应跟不上,所以不要
被它“17位”迷惑,在设计选择伺服电机时要注意。
3.再生制动频率
再生制动频率表示元负载时电机从额定速度到减速停止的可允许频率。
需要注意的是,一般样本列表上的制动次数是电机在空载时的数据。实际选型中要先根据系统的负载惯量和样本上的电机惯量,算出惯量比。再以样本列表上的制动次数除以(惯量比+1),这样得到的数据才是允许的制动次数。
4.伺服电机轴上的径向和轴向负载
确保在安装和运转时加到伺服电机轴上的径向和轴向负载控制在每种型号的规定值以内,否则会加速伺服电机的磨损,降低电机的寿命,甚至影响所要求达到的精度。
5.输出轴的公差配合
要注意电机轴伸与其它零部件的配合关系。对于普通旋转电机圆柱形轴伸(GB/T756-1990)的公差带见表1,轴伸与其它零部件一般为间隙配合,而伺服电机的轴伸公差带一般为h6。
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。

伺服电机可以在一定范围内精确控制电机的位置和转速,基本上是无级变速,简化了传动系统。伺服驱动器采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。能够精确的控制电机的转动,从而实现精确的定位。
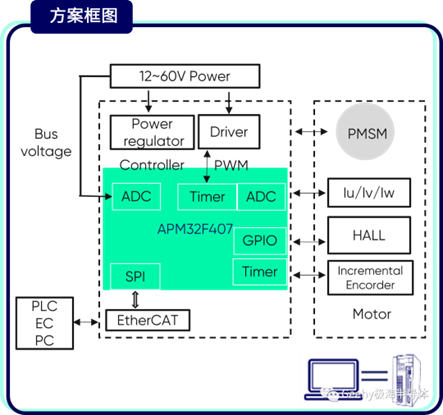
作为现代工业运动控制的重要组成部分,低压伺服驱动器通过力矩、速度、位置三种方式对伺服电机进行精准控制,被广泛应用于低压供电场合、定位控制、移动供电场合等安装空间小、用电安全高的自动化应用场景中。

应用于高速度伺服电机的新型伺服电缆。
伺服压力机节能环保:伺服压力机采用伺服电机。机器待机时电机不旋转。在压机安装中,速度和功率也在发生变化。

在电机驱动与控制、电力电子、工业网络通讯等核心技术方面拥有领先优势。城陵矶新港区伺服电机项目一期占地200余亩,全部达产后可实现年产值60亿元、年税收1亿元,将为岳阳市智能制造产业集群发展提供强力支撑。
伺服电机一般主要使用在机械手,机械臂,注塑机,数控机床等等一些比较专用的精密设备上,它的用途非常广泛也大大促进了工业制造行业的发展。

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。


