电机控制新技术给机器人带来了怎样的好处?
2018-10-18 11:41:17 来源:电子发烧友网
【哔哥哔特导读】传统意义上来看,电机控制对电子工程师来说一直是个难题,因为此时要考虑诸多关键问题和我们在常见电子所遇到的有很大不同。幸运的是,由于技术的提高,使得这些问题更容易被理解和处理,同时也使高性能表现成为可能。
我们大多数人都很了解科幻小说里的机器人,但现实中真正大量增多的是能够自我引导和远程引导的机器。这些机器人操作预先规划好的具体任务,比如组装线工作,手术援助,仓库提货/检索,甚至是如排除地雷等危险任务。如今的机器人不仅能够处理高重复度的工作,还能完成在方向和动作上需求灵活性的复杂功能。
图1:如今机器人被大量运用在小的领域如贴片机、安装机器到大的领域如自动组装线上,它们在组装线上抬、放置、安装甚至焊接和组装零件
这些高性能机器的实现得益于以下几个方面的提升:一是帮助它们“听”、“看”、“感觉”的传感器的提升;二是实现实时决策及动作的计算能力及算法复杂性的提升;三是用速度、准确度和机械动力来实现这些决策的电机的提升。上述的每个方面在机器人设计中都扮演了重要的角色,因为技术进步以及它们之间的协同作用都迅速在本身建立。
传统意义上来看,电机控制对电子工程师来说一直是个难题,因为此时要考虑诸多关键问题和我们在常见电子所遇到的有很大不同。幸运的是,由于技术的提高,使得这些问题更容易被理解和处理,同时也使高性能表现成为可能。例如,TI公司DRV8816双半桥电机驱动器已经集成了包括短地保护、高温报警、高温断电等内部保护功能。低功耗睡眠模式关闭内部电路,以达到非常低的静态电流。高度集成的控制器和驱动器反映了电子和电机在灵活性和集成性方面所达到的层次。
从电机选择开始
在具体选择电机型号时,有三个首要的因素设计师要考虑:
1. 电机的最小最大转速(还有加速度)
2. 电机可以提供的最大扭矩,还有扭矩和速度曲线的关系
3. 电机操作(不用传感器和闭环控制时)的精确性和重复性
当然,在选择电机时还有许多其它如尺寸、重量还有成本等重要因素要考虑。几乎对于所有小到中等大小的机器人驱动器来说,驱动器电机的选择通常有有刷直流电机,无刷直流电机(BLDC)和步进电机。(然而,某些情形下液压与气压机是最好的选择;请看栏目“利用流体动力?”。)
有刷电机,这个最古老的的直流电机技术,是最简单、成本也最低的选择(图2)。由于载流刷与转子间的接触,电机转子的转动会切换(转向)围绕在转子周围绕组的场。电机的速度是所加电压的函数,因此驱动要求不高,但管理扭矩和关联位置很难。由于电机磨损、因刷和弹簧脏了需要清理、并且由于刷和转子接触时产生的火花可能会成为电子噪声源(电磁干扰)等因素,驱动条件也存在可靠性问题。由于这些问题的存在,大多数情况下,有刷电机对于机器人设计来说是最不具有吸引力的选择。
图2:在有刷电机里,导电刷(用铜刷毛或更有可能是石墨块制作而成)接触转子上的触点。随着转子变向,它会切换周围线圈电流的极性
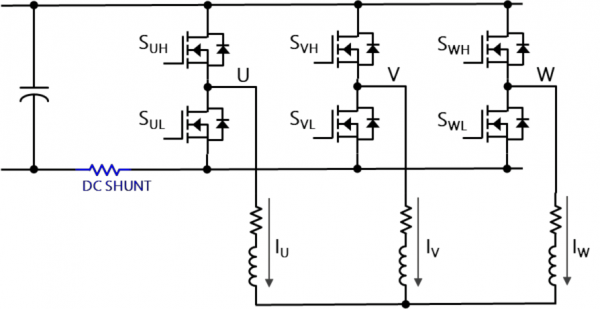
无刷电机(图3)的出现开始于19世纪60年代,这得益于两方面的发展:一是出现了坚固、体积小、低成本的永磁铁;二是出现了体积小效率高的电子开关(通常为mos管,但有时候是具有低压降的双极型晶体管)来切换流向绕组的电流。周围固定的切换线圈与旋转芯上的磁铁间的相互作用取代了有刷电机的机械换向。通过精确控制mos管(通常配置在H桥结构)的通断,线圈上的磁场因此被切换。通过改变mos管通断的频率,电机速度从而可以被控制。另外,通过一个传感器,电机控制器能获取到机器人的位置,这样对机器人的性能上能有更好的控制。
图3:在无刷电机里,当线圈磁场与转子上的永久磁铁相互作用时,定子绕组里的线圈电流被电切换。图中,空缺的转子属于中间位置
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。
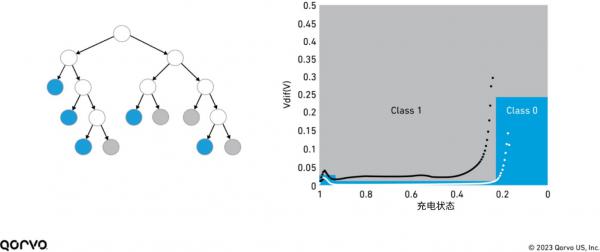
用于 MCU 实施的机器学习(tinyML)技术是一个不断发展的领域;其可为电池管理和电机控制带来新的增强功能。
集成度更高、性能更强的微控制器(MCU)可实现更高的功率效率、更平稳安全的运动以及更高的精度,从而提高生产力和自动化水平。

电机控制器下游主要应用市场分析及预测,重点研究华南电机智能控制器厂商市场,未来电机控制器发展趋势及预测。
电机控制器下游主要应用市场分析及预测,重点研究华东电机智能控制器厂商市场,未来电机控制器发展趋势及预测。

受新能源车成本不断降低的影响,上半年燃油车掀起了一轮价格战,反过来也刺激新能源汽车厂商进一步降低成本,未来新能源车载电源走势如何?磁性元件企业又该如何把握机会?
电机控制方案重点在于高速实时的控制,主要影响电机矢量控制精确度,而MCU则赋予电机高性能工作的能力,为此,雅特力开发出一套完整高效的电机控制生态系统,提供多系列适用于电机控制的MCU产品型号,如AT32F413、AT32F421等系列。

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。