步进电机及驱动在应用中的设置技巧及方法
2017-04-25 14:50:20 来源:互联网
【哔哥哔特导读】步进电机是一种作为控制用的特种电机, 它的旋转是以固定的角度(称为"步距角")一步一步运行的, 其特点是没有积累误差(精度为100%), 所以广泛应用于各种开环控制。
步进电机是一种作为控制用的特种电机, 它的旋转是以固定的角度(称为"步距角")一步一步运行的, 其特点是没有积累误差(精度为100%), 所以广泛应用于各种开环控制。
步进电机的运行要有一电子装置进行驱动, 这种装置就是步进电机驱动器, 它是把控制系统发出的脉冲信号转化为步进电机的角位移, 或者说: 控制系统每发一个脉冲信号, 通过驱动器就使步进电机旋转一步距角。所以步进电机的转速与脉冲信号的频率成正比。所以,控制步进脉冲信号的频率,可以对电机精确调速;控制步进脉冲的个数,可以对电机精确定位目的。
步进电机通过细分驱动器的驱动,其步距角变小了,如驱动器工作在10细分状态时,其步距角只为‘电机固有步距角‘的十分之一,也就是说:‘当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动1.8°;而用细分驱动器工作在10细分状态时,电机只转动了0.18° ,这就是细分的基本概念。 细分功能完全是由驱动器靠精确控制电机的相电流所产生,与电机无关。
驱动器细分后的主要优点为:完全消除了电机的低频振荡。低频振荡是步进电机(尤其是反应式电机)的固有特性,而细分是消除它的唯一途径,如果您的步进电机有时要在共振区工作(如走圆弧),选择细分驱动器是唯一的选择。提高了电机的输出转矩。尤其是对三相反应式电机,其力矩比不细分时提高约30-40% 。提高了电机的分辨率。由于减小了步距角、提高了步距的均匀度,‘提高电机的分辨率‘是不言而喻的。以上是步进电机的基本原理,接下来,针对步进电机驱动的设计、选型实战经验进行总结:选择保持转矩(HOLDING TORQUE)
保持转矩也叫静力矩,是指步进电机通电但没有转动时,定子锁住转子的力矩。由于步进电机低速运转时的力矩接近保持转矩,而步进电机的力矩随着速度的增大而快速衰减,输出功率也随速度的增大而变化,所以说保持转矩是衡量步进电机负载能力最重要的参数之一。比如,一般不加说明地讲到1N.m的步进电机,可以理解为保持转矩是1N.m。
选择相数
两相步进电机成本低,步距角最少1.8 度,低速时的震动较大,高速时力矩下降快,适用于高速且对精度和平稳性要求不高的场合;三相步进电机步距角最少1.5度,振动比两相步进电机小,低速性能好于两相步进电机,最高速度比两相步进电机高百分之30至50,适用于高速且对精度和平稳性要求较高的场合;5相步进电机步距角更小,低速性能好于3相步进电机,但成本偏高,适用于中低速段且对精度和平稳性要求较高的场合。
选择步进电机
应遵循先选电机后选驱动器原则,先明确负载特性,再通过比较不同型号步进电机的静力矩和矩频曲线,找到与负载特性最匹配的步进电机;精度要求高时,应采用机械减速装置,以使电机工作在效率最高、噪音最低的状态;避免使电机工作在振动区,如若必须则通过改变电压、电流或增加阻尼的方法解决;电源电压方面,建议57电机采用直流24V-36V、86电机采用直流46V、110电机采用高于直流80V;大转动惯量负载应选择机座号较大的电机;大惯量负载、工作转速较高时,电机而应采用逐渐升频提速,以防止电机失步、减少噪音、提高停转时的定位精度;鉴于步进电机力矩一般在40Nm以下,超出此力矩范围,且运转速度大于1000RPM时,即应考虑选择伺服电机,一般交流伺服电机可正常运转于3000RPM,直流伺服电机可可正常运转于10000RPM。
选择驱动器和细分数
最好不选择整步状态,因为整步状态时振动较大;尽量选择小电流、大电感、低电压的驱动器;配用大于工作电流的驱动器、在需要低振动或高精度时配用细分型驱动器、对于大转矩电机配用高电压型驱动器,以获得良好的高速性能;在电机实际使用转速通常较高且对精度和平稳性要求不高的场合,不必选择高细分数驱动器,以便节约成本;在电机实际使用转速通常很低的条件下,应选用较大细分数,以确保运转平滑,减少振动和噪音;总之,在选择细分数时,应综合考虑电机的实际运转速度、负载力矩范围、减速器设置情况、精度要求、振动和噪音要求等。
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。
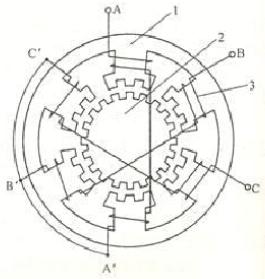
步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。步进电机驱动器,是一种将电脉冲转化为角位移的执行机构。步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。

哔哥哔特将邀请MPS电机驱动芯片产品线高级应用工程于2022年12月15日下午14:00至15:00主办一场线上直播会议,演讲主题为《步进电机的反电动势研究》,报名正在火热进行中,欢迎企业积极报名!
由于步进电机能够逐步移动,因此它们在工业自动化和机器人技术中得到了应用。这些电机用于 IC 制造单元。这些电机在 CNC(计算机数字控制)机器和 xy 绘图仪的设计中起着不可或缺的作用。

对于步进电机失步问题,用户首先要知道,一般电机失步都是其中一相或二相缺失,即一条线路断了,不能正常发挥功能,从而导致电机失步

混合式步进电机是指混合了永磁式和反应式的优点。它又分为两相、三相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度,混合式步进电机随着相数(通电绕组数)的增加,步进角减小,精度提高,这种步进电机的应用最为广泛。

伺服电机本体搭载旋转检测器(编码器),向驱动器反馈电动机轴的旋转位置/转速。驱动器通过演算从控制器发出的脉冲信号(位置指令/速度指令)与反馈信号(当前位置/速度)的误差,将此误差控制为0,进行电动机旋转的控制。

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。