浅析步进电机的选择与使用
2016-02-19 13:43:30 来源:论文网
【哔哥哔特导读】随着机电一体化技术的不断发展,步进电机作为机电一体化系统中常见的执行装置得到了广泛地应用,因此生产步进电机的厂商越来越多,这就给用户在其选择上带来了一些困惑。
随着机电一体化技术的不断发展,步进电机作为机电一体化系统中常见的执行装置得到了广泛地应用,因此生产步进电机的厂商越来越多,这就给用户在其选择上带来了一些困惑。基于这种原因,本人以目前最常用的反应式步进电机为例,主要阐述了其工作原理、机械特性、实际应用中的选择和使用,希望对广大用户在其选择上能有所帮助。
步进电机又称脉冲电动机,它是一种将电脉冲信号转变为角位移或线位移的执行电动机,它一般用作于开环控制系统的执行装置。近年来由于计算机应用技术的迅速发展,步进电机常用于和计算机组成高精度的数字控制系统。在非超载的情况下,步进电机的转速、停止的位置等只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给其加一个脉冲信号,其就会转动一个步距角,这一线性关系的存在,与其只有周期性误差而无累积误差的特点,使其在速度、位置等控制领域中得到了广泛地应用。
目前,生产步进电机的厂商有很多,但具有专业技术人员能自行开发研制的厂商却很少,大多数厂商只是处于盲目的仿制阶段,其办厂规模不是很大,甚至连最基本的专业设备都不具备,这就给我们在产品的选择上带来了一些困惑。基于这种原因,本人结合实际工作情况所积累的理论知识与实践经验,以目前最常用的反应式步进电机为例,主要阐述了其工作原理、机械特性、实际应用中的选择和使用,希望对广大用户在产品的选择上能够有所帮助。
一、反应式步进电机的工作原理
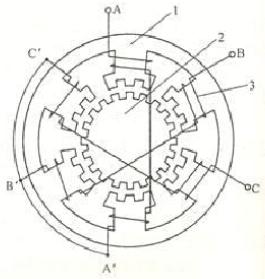
以三相反应式步进电机为例。三相反应式步进电机由定子和转子两大部分组成。在定子上有三对磁极,磁极上装有励磁绕组,励磁绕组分成三相,即A、B、C。在转子上均匀分布着四个相位差为90°的转子齿,转子上不装设绕组,为硅钢片或软磁性钢片叠成的铁心。
当步进电机A相通电,B和C相不通电时,由于A相绕组产生的磁通要经过磁阻最小的路径形成闭合磁路,这样将使转子齿1、3和定子的A相对齐。当步进电机B相通电,A和C相不通电时,由于B相绕组产生的磁通要经过磁阻最小的路径形成闭合磁路,这样将使转子齿2、4和定子的B相对齐。当步进电机C相通电,A和B相不通电时,由于C相绕组产生的磁通要经过磁阻最小的路径形成闭合磁路,这样将使转子齿1、3和定子的C相对齐。
按照A-B-C-A的通电顺序往复下去,则步进电机的转子将按一定速度沿逆时针方向旋转。反之,若按照A-C-B-A的通电顺序往复下去,则步进电机的转子将反方向转动。这种通电方式,称为三相单三拍方式。步进电机还可以使用三相双三拍(即AB-BC-CA-AB和AC-CB-BA-AC)和三相单、双六拍(即A-AB-B-BC-C-CA-A和A-AC-C-CB-B-BA-A)的通电方式。
由此可见,步进电机转速大小取决于三相控制绕组通、断电源的频率,方向取决于其通电顺序。当其定子上有m相励磁绕组时,其轴线分别与转子齿的轴线偏移1/m、2/m……(m-1)/m、1,其通电顺序按照一定相序,步进电机就能实现正反转运行,基于这种原理,我们就可以生产出各种相数的步进电机。
二、反应式步进电机的机械特性
1、步距角及步距角精度。步距角是指给步进电机输入一个脉冲后其所转过的角度,即Ψ=360°/(KmZ),其中m为相数;Z为转子齿数;K为通电方式,全步方式K=1,半步方式K=2,通常在步进电机的参数表中给出两个步距角。与工作原理相对应的步进电机全步方式时,其步距角为30°;半步方式时,其步距角为15°。步距角精度是指步进电机在空载状态下每步转过角度与理论角度之差,一般其步距角精度小于10′。
2、静态特性。1)矩角特性:指在不改变通电状态的条件下,步进电机静转矩与失调角之间的关系,即T=-kI2sin,其中k为转矩常数;I为控制绕组电流;为失调角;2)最大静转矩:矩角特性中静转矩的最大值,即Tmax=kI2。
3、动态特性。1)矩频特性:指输出转矩与输入频率的关系。在负载转矩一定的条件下,步进电机运行频率必须小于对应的频率值,否则就会出现失步;2)惯频特性:指转动惯量与输入频率的关系;3)起动频率:指步进电机在带动一定负载时,不失步起动的最高频率;4)运行频率:指步进电机不失步运行的最高频率。起动时,步进电机需要足够长的时间加速才能保证不失步,因此,在实际应用中选用的运行频率应该高于起动频率。
三、步进电机的选择
步进电机的选择主要通过确定步距角、静转矩、电流的大小,就能确定其型号了。
1、步距角的选择
步进电机步距角的选择取决于系统负载分辨率的要求,将系统负载所要求的最小分辨率换算到步进电机的轴上就是此时步进电机应走过的角度,步进电机的步距角应该等于或小于该角度。在实际应用中,步进电机的步距角一般有1.5°/3°(三相)、0.9°/1.8°(二相或四相)、0.36°/0.72°(五相)等等。
2、静转矩的选择
步进电机静转矩的选择取决于系统负载种类的要求,系统负载的种类分为摩擦负载和惯性负载。步进电机直接起动时要考虑摩擦负载和惯性负载;加速起动时主要考虑惯性负载;恒速运行时主要考虑摩擦负载。在实际应用中,步进电机的静转矩一般为摩擦负载的2-3倍的范围内,步进电机的静转矩一旦确定下来,那么步进电机的几何尺寸,即机座就能确定下来了。
3、电流的选择
步进电机电流的选择取决于系统的矩频特性,步进电机的静转矩一定时,电流参数不同,其运行性能也不同。在实际应用中,步进电机的转速越高,力矩就越大,则要求其电流就越大,驱动电源的电压就越高。要使步进电机的电流大,尽可能提高驱动电源的电压,就必须选择小电感大电流的步进电机。
四、步进电机的使用
1、步进电机适用于低速场合,其最高工作转速一般在300-600r/min,可通过减速装置使其在此范围内进行工作,此时步进电机的工作效率较高,噪声较低;2、步进电机最好不使用整步状态,因为整步状态时步进电机的振动较大;3、步进电机的标称电压值为12V时可以使用12V的驱动电源,除此之外,其他步进电机的驱动电源可以根据驱动器进行选择;4、步进电机拖动惯量较大的负载时,应该选择较大机座号的步进电机;5、步进电机要求较高速运行时,应该采用逐渐升频提速的方法。这样做的好处是:一能够使步进电机不失步;二能够使步进电机在运行中减少噪声;三能够使步进电机提高停车的定位精度;6、步进电机要求较高精度运行时,应该采用机械减速、提高步进电机转速的方法,或采用高细分数的驱动器驱动步进电机的方法,或采用5相步进电机的方法;7、在实际应用中,应该遵循先选步进电机再选步进电机驱动器的原则。
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请与我
们联系,我们将及时更正、删除,谢谢。
步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。步进电机驱动器,是一种将电脉冲转化为角位移的执行机构。步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。

哔哥哔特将邀请MPS电机驱动芯片产品线高级应用工程于2022年12月15日下午14:00至15:00主办一场线上直播会议,演讲主题为《步进电机的反电动势研究》,报名正在火热进行中,欢迎企业积极报名!
由于步进电机能够逐步移动,因此它们在工业自动化和机器人技术中得到了应用。这些电机用于 IC 制造单元。这些电机在 CNC(计算机数字控制)机器和 xy 绘图仪的设计中起着不可或缺的作用。

对于步进电机失步问题,用户首先要知道,一般电机失步都是其中一相或二相缺失,即一条线路断了,不能正常发挥功能,从而导致电机失步

混合式步进电机是指混合了永磁式和反应式的优点。它又分为两相、三相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度,混合式步进电机随着相数(通电绕组数)的增加,步进角减小,精度提高,这种步进电机的应用最为广泛。

伺服电机本体搭载旋转检测器(编码器),向驱动器反馈电动机轴的旋转位置/转速。驱动器通过演算从控制器发出的脉冲信号(位置指令/速度指令)与反馈信号(当前位置/速度)的误差,将此误差控制为0,进行电动机旋转的控制。

第一时间获取电子制造行业新鲜资讯和深度商业分析,请在微信公众账号中搜索“哔哥哔特商务网”或者“big-bit”,或用手机扫描左方二维码,即可获得哔哥哔特每日精华内容推送和最优搜索体验,并参与活动!
发表评论

哔哥哔特资讯
重视商业和技术性活动在推动行业服务工作方面
的重要作用,并与相关行业组织密切合作关系。





